Продолжается разработка роботов, которые смогут помочь первым за более чем полвека исследователям Луны. Одним из наиболее важных аспектов этого будущего путешествия будет использование ресурсов, имеющихся на поверхности Луны, известное как использование ресурсов на месте (ISRU). Это дало бы исследователям доступ к таким материалам, как вода, конструкционные металлы и ракетное топливо, но только в том случае, если они смогут извлечь их из горных пород и реголита, из которых состоит поверхность Луны.
В новой статье исследователей, в основном связанных с Университетом Тохоку, описывается разработка и тестирование робота-экскаватора, который однажды может помочь исследователям Луны раскрыть потенциал планеты. Исследование опубликовано на сервере препринтов arXiv.
Одной из основных проблем, связанных с использованием обычного горного оборудования на Луне, является гравитация. Такое оборудование, как бульдозеры и ковшовые экскаваторы, использует свой большой вес в своих интересах, применяя его для приложения усилия к добываемому материалу, что позволяет им перемещать большие куски за один раз. Этот метод неосуществим на Луне, где низкая гравитация привела бы к тому, что даже "тяжелое" горнодобывающее оборудование просто передвигалось бы само по себе, а не извлекало какие-либо ресурсы.
Поэтому инженеры Университета Тохоку и НАСА обратили свое внимание на конструкцию "ковшового экскаватора". В данном случае конструкция ковшового барабана имеет два основных преимущества перед традиционным оборудованием для добычи полезных ископаемых на Луне. Во-первых, он может извлекать лишь небольшое количество материала за каждый проход, что требует гораздо меньших усилий, чем один большой совок или ведро.
Однако проходы могут выполняться быстро и непрерывно, что позволяет ему по-прежнему эффективно производить выемку большого объема грунта за относительно короткий промежуток времени. Во—вторых, он может выполнять три ключевых процесса обработки материала — выемку грунта, загрузку материала и транспортировку - и все это без использования конвейерной ленты, которая может выйти из строя в условиях абразивной лунной пыли.
Робот НАСА Regolith Advanced Surface Systems Operations Robot (RASSOR) в настоящее время является золотым стандартом для экскаваторов такого типа, поскольку сам уже прошел несколько этапов испытаний. Однако японское космическое агентство JAXA поддерживает разработку программы "Лунный полет" с целью создания роботов, которые не будут требовать постоянного наблюдения с Земли, для поддержки исследователей Луны к 2050 году. В недавней статье описывается модульная платформа Moonbot, первоначально разработанная в университете.
Инженеры разработали тип "спирального ковша", который решает одну из основных проблем традиционных конструкций ковшовых барабанов — выпадение материала при вращении барабана. Это усовершенствование гарантирует, что входное отверстие барабана всегда соприкасается с почвой, а выходное отверстие всегда находится, по крайней мере, немного выше уровня собранного материала, предотвращая его высыпание.
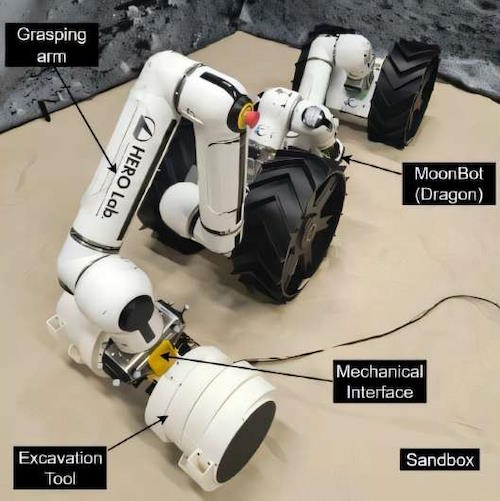
Чтобы доказать ее эффективность, авторы создали прототип системы и провели с ней несколько тестов, как с креплением к шасси Moonbot, так и без него. Два барабана по обе стороны роботизированной руки (которая обеспечивает интерфейс с платформой Moonbot) изготовлены в основном из PLA, напечатанного на 3D-принтере, с некоторыми усилениями из углеродного волокна в некоторых зубчатых колесах. Сама насадка весит всего 4,8 кг, в то время как при полной загрузке она вмещает около 21 л материала.
Результаты испытаний автономного манипулятора были впечатляющими. Сам по себе он мог производить выемку грунта со скоростью около 777 кг/ч при потреблении всего 0,022 Вт*ч/кг и впечатляюще низком энергопотреблении при больших объемах выемки грунта. Даже при установке на марсоход "Дракон" (то есть на шасси лунохода, сконфигурированного как марсоход) скорость выемки грунта фактически возросла до 839 кг/ч.
Однако, чтобы смоделировать реальный сценарий миссии, команда внедрила протокол, согласно которому робот должен был выкапывать материал до тех пор, пока он не заполнится, проехать 10 м до "места свалки", сложить собранный материал, вернуться на рабочее место и начать работу снова. В этом случае производительность снижается всего до 172 кг/ч при энергопотреблении 0,86 Втч/кг, что значительно ниже, чем у специализированных систем для добычи полезных ископаемых, но сопоставимо с другими системами, такими как RASSOR.
Однако всегда есть возможности для совершенствования, и в данном случае есть место как для разработки миссии, так и для дизайна самого робота. Поскольку Moonbot представляет собой модульную платформу, проектировщики миссии могли бы создать отдельный специализированный вездеход—тягач, который мог бы доставлять материал на свалку, позволяя экскаватору просто сосредоточиться на том, что у него получается лучше всего - выкапывать материал.
И чтобы сделать это еще лучше, разработчики хотят внедрить дополнительные датчики и средства управления для следующей итерации. Они также планируют спроектировать устройство таким образом, чтобы оно выдерживало суровые условия на Луне, что будет иметь решающее значение для его реального использования.
На данный момент статья представляет собой еще один шаг на пути к созданию полезных роботов на поверхности Луны, причем ковшовые барабаны, по-видимому, являются излюбленным выбором инженеров для этого случая использования. Возможно, пройдет немного времени, прежде чем мы увидим его в действии на самой Луне, но в какой-то момент в будущем вращающийся ковш начнет выбрасывать лунный материал, который оставался нетронутым в течение миллиардов лет.