|
Микророботы, которые чувствуют, думают, действуют
|
|
|
|
Хотя миниатюризация была целью робототехники на протяжении почти 40 лет, робототехники изо всех сил пытались достичь субмиллиметровых размеров, не жертвуя при этом бортовой обработкой информации, из-за уникальной физики микромасштаба. Следовательно, микророботам часто не хватает ключевых функций, которые отличают их макроскопических собратьев от других машин, а именно роботизированных систем для принятия решений, зондирования, обратной связи и программируемых вычислений. Здесь мы решаем задачу создания робота, сравнимого по размерам с одноклеточным паразитом, который может чувствовать, мыслить и действовать, используя бортовые системы для вычислений, сенсорики, памяти, передвижения и коммуникации. Созданные в массовом масштабе параллельно с полностью литографской обработкой, эти микророботы могут выполнять цифровые алгоритмы и автономно изменять поведение в зависимости от окружающей среды. В совокупности эти результаты открывают путь к созданию микророботов общего назначения, которые могут быть запрограммированы многократно с помощью простой настройки и могут работать сообща для выполнения задач без контроля в условиях неопределенности.
|
|
|
|
Природные микроорганизмы демонстрируют возможность создания автономных интеллектуальных систем, размеры которых слишком малы, чтобы их можно было увидеть невооруженным глазом, и этот факт десятилетиями восхищал робототехников (1, 2). В идеале микроскопический робот должен сохранять все особенности, которые отличают его макроскопических собратьев от других машин: Он был бы способен воспринимать, вычислять действия, поддерживать многократное программирование и манипулировать окружающим миром или исследовать его. Однако миниатюризировать роботов, не отказываясь от многих из этих характеристик, оказалось непросто.
|
|
|
|
|
|
|
В настоящее время самые маленькие роботы с полностью интегрированными системами зондирования, программируемых вычислений и управления движением имеют размер не более миллиметра (3), впервые достигнутый более 20 лет назад (4). Дальнейшему сокращению этих первых успехов препятствовал тот факт, что многие физические законы, управляющие полупроводниковыми схемами (5), накоплением энергии (6), передачей мощности (7) и движением в макромасштабе (8, 9), изменяются сверхлинейно в зависимости от размера, что усугубляет серьезные проблемы, поскольку роботы пытаются уменьшиться в размерах. субмиллиметровые размеры. В результате для создания действительно микроскопических роботов требуются принципиально иные подходы (10).
|
|
|
|
Как правило, робототехники обходят барьеры на пути к достижению микромасштаба, управляя передвижением извне с помощью периферийного оборудования, жертвуя при этом программируемостью, чувствительностью и/или автономностью (9, 11-13). Эти устройства, несмотря на высокую функциональность, остаются привязанными к внешнему оборудованию для принятия решений и выполнения задач, часто не могут реагировать на окружающую среду и/или могут переключаться между ограниченным числом жестко запрограммированных действий только по команде. Даже когда микророботы оснащаются бортовой электроникой, обеспечивающей однонаправленную связь и передвижение по замкнутому циклу, они все равно не могут воспринимать окружающий мир, и им еще предстоит внедрить реальную компьютерную архитектуру, которая поддерживала бы программируемое принятие решений (14). В результате микророботы сталкиваются с трудностями в незнакомой среде и обладают ограниченной возможностью реконфигурации после изготовления, что снижает их полезность в реальных приложениях (13).
|
|
|
|
Здесь мы применяем другой подход, непосредственно решая задачу создания робота, способного воспринимать окружающую среду, вычислять программируемые в цифровом виде действия и изменять свое поведение, и все это в условиях, которые слишком малы, чтобы их можно было увидеть невооруженным глазом. Наш подход использует полупроводниковое производство для параллельного литографического создания корпуса робота, приводов и информационных систем. Оптимизировав схемы, приводы и протоколы изготовления в соответствии с физическими ограничениями, связанными с работой в небольших масштабах, мы смогли сократить количество программируемых автономных роботов, которые чувствуют, думают и действуют, в 10 000 раз (3, 4, 15). В то же время перенос вычислений на микроробота сводит к минимуму как затраты, так и операционные издержки, открывая путь к широкому внедрению.
|
|
|
|
Хотя многие из основных компонентов интеллектуального микроробота, включая малогабаритные датчики, исполнительные механизмы и системы обработки информации, были продемонстрированы по отдельности в пакетах размером ~ 100 мкм (16-20), интеграция этих систем в единый микроробот без нарушения ограничений по мощности, размеру, технологичности или производительности остается сложной задачей. Например, из-за ограниченного бюджета мощности (~100 Нвт) небольших роботов трудно одновременно управлять движением и вычислениями. Аналогичным образом, материалы и процессы, используемые для создания этих систем, должны быть совместимы: при изготовлении привода не может быть повреждена электроника. Аналогичным образом, процессы должны быть масштабируемыми для большого количества устройств, выпускаемых в свободном доступе.
|
|
|
|
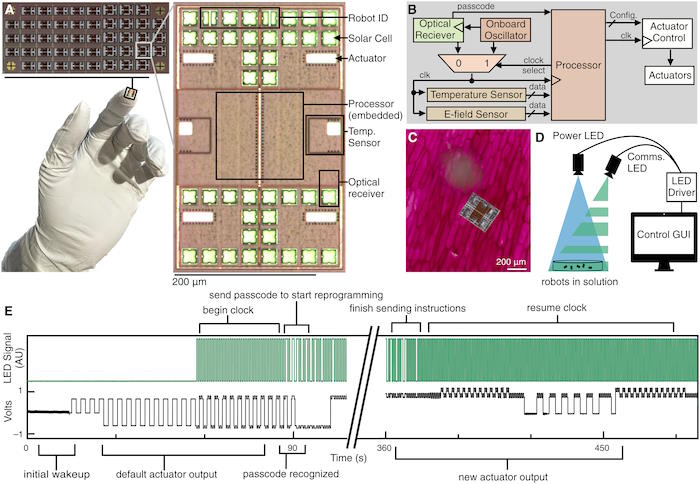
Мы решили проблему интеграции со схемами и протоколами нанотехнологий, адаптированными для автономных микророботов. Что касается схемы, то мы работали в рамках ограниченного бюджета мощности ~ 100 Нвт, построив наш робот по 55-нм технологии комплементарного металл-оксидного полупроводника (КМОП) и используя подпороговую цифровую логику. Высокое пороговое напряжение этого процесса позволило снизить утечку транзисторов, достаточную для поддержки различных бортовых схем в субмиллиметровом корпусе без нарушения ограничений по мощности. В частности, рис. На рис. 1 (А и В) показано, что в размерах 210 на 340 на 50 мкм мы смогли разместить фотоэлектрические элементы (PV) для питания, датчики температуры, четыре схемы управления приводом, оптический приемник для нисходящей связи и программирования, процессор и память. Эти подсхемы были оптимизированы для минимизации размеров и энергопотребления, изготовлены на промышленном литейном заводе и подробно описаны в нашей предыдущей публикации и/или Материалах и методах (19). Мы построили две конфигурации роботов, которые отличались только количеством фотоэлементов, в результате чего ширина корпуса составила 210 и 270 мкм, хотя, как было показано позже, мы не обнаружили заметных различий в производительности между ними. При таком масштабе размеры робота и его энергопотребление сравнимы со многими одноклеточными микроорганизмами (21); На рис. На 1С робот показан в масштабе рядом с растительными клетками.
|
|
|
|
Источник
|







